Biography
Hello! I’m Qingquan Bao, currently a graduate student specializing in robotics at the General Robotics, Automation, Sensing & Perception (GRASP) Lab, University of Pennsylvania. I’m on the lookout for internship opportunities in Machine Learning Engineering or Software Engineering. Please feel free to get in touch!
My aspiration is to develop a versatile agent capable of assisting with both physical and intellectual tasks in our daily lives. I firmly believe that embodied AGI is crucial for advancing humanity liberty and democracy. So my current research interests focous on robot learning (esp. in mobile manipulation task), LLM in planning and RAG. Professionally, I am keen on implementing intelligent systems in cyberspace or ACTUAL robotic applications.!
Prior to joining Penn, I graduated cum laude (Zhiyuan Honor) in 2023 from Shanghai Jiao Tong University. During my enriching undergraduate years, I collaborated with Professor Junchi Yan on topics of Vision Graph Matching, Trustworthy AI, and Neural Architecture Search. I also had the privilege of working with Professors Joshua B. Tenenbaum, Chuang Gan, Leslie Pack Kaelbling, Tomás Lozano-Pérez in the field of Embodied AI.
- Artificial General Intelligence
- Robotics and Embodied AI
- Humanoid Robots
- Mobile Manipulation
M.S. in Robotics, 2025 (Expected)
University of Pennsylvania
B.E. in Artificial Intelligence, 2023
Shanghai Jiao Tong Univerisity
Skills
Experience
Projects include:
- Deep Graph Matching library with PaddlePaddle
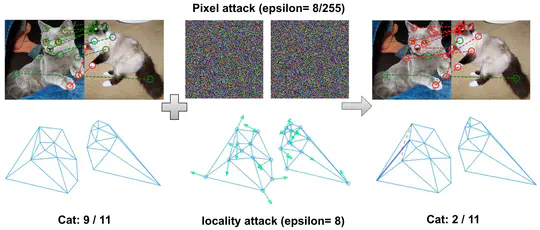
- Appearance and Structure Aware Robust Deep Visual Graph Matching: Attack, Defense and Beyond
- Visual Model Search and Optimization for Software and Hardware Co-design (My Bachelor’s thesis)
Projects
Recent Publications
Contact
Feel free to contact me!