Biography
Hello! I’m Qingquan Bao, a Software Engineer on the ML Motion Planning team at Zoox, working on Pretraining and Reinforcement Learning for L4 autonomous driving.
My aspiration is to develop a versatile agent capable of assisting with both physical and intellectual tasks in our daily lives. I firmly believe that embodied AGI is crucial for advancing humanity’s liberty and democracy.
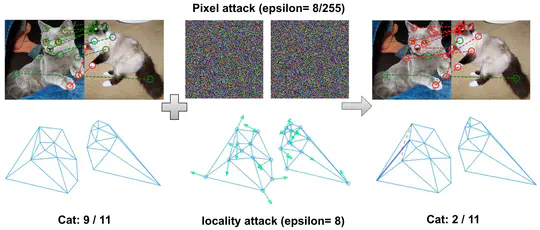
I completed my M.S. in Robotics (GPA 4.0/4.0) at the GRASP Lab, University of Pennsylvania in May 2025. Prior to Penn, I graduated cum laude (Zhiyuan Honor) in 2023 from Shanghai Jiao Tong University. During my undergraduate years, I collaborated with Professor Junchi Yan on Vision Graph Matching and Trustworthy AI (CVPR 2022), and had the privilege of working with Professors Joshua B. Tenenbaum, Chuang Gan, Leslie Pack Kaelbling, and Tomás Lozano-Pérez on Embodied AI at MIT.
- Artificial General Intelligence
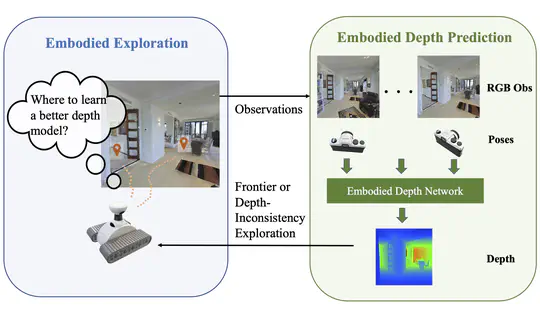
- Robotics and Embodied AI
- Humanoid Robots
- Mobile Manipulation
M.S. in Robotics, GPA 4.0/4.0, 2025
University of Pennsylvania
B.E. in Artificial Intelligence (Honors), GPA 4.0/4.3, 2023
Shanghai Jiao Tong University
Skills
Experience
Develop Pretraining and Reinforcement Learning to build long-horizon trajectory models for production.
- Designed autoregressive policy head for BC/RL planner; improved candidate selection by 2% and safety score by 0.8%
- Evaluated representation-learning (MAE-style pretraining) alignment with downstream RL objectives
- Traced JAX runtime regression (8× slowdown) and restored throughput via vectorized workaround
- Shipped virtual stopline for pickup/drop-off zones, eliminating looping incidents
Projects include:
- Deep Graph Matching library with PaddlePaddle
- Appearance and Structure Aware Robust Deep Visual Graph Matching: Attack, Defense and Beyond
- Visual Model Search and Optimization for Software and Hardware Co-design (My Bachelor’s thesis)
Projects
Recent Publications
Contact
Feel free to contact me!