清泉
清泉
Home
Projects
Publications
Contact
CV
Light
Dark
Automatic
Robotics
Modular Gait Optimization - From Unit Moves to Full Trajectory in Bipedal Systems
Let’s see how to train your baby Biped w/o learning!
PDF
Code
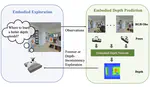
Embodied Depth Prediction
We study the problem of embodied depth prediction, where an embodied agent in an environment must learn to accurately estimate the depth of its surroundings.
Heuristic Reward Driven Athlete Trainer
Let’s train an excellent Olymic runner with partial observations and use curiosity as dense rewards!
PDF
Code
Cite
×